Vectors in Space
Position Vectors
|
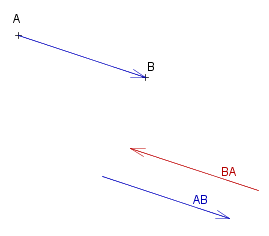
A vector can be represented by a line connecting two points in space, the length of the line representing the magnitude of the vector. The direction is the direction from one point to the other. Such a vector from point A to point B, will be denoted AB. The order of the points is important, as AB != BA, ( in fact AB = -BA ). Any other line which is parallel to AB and of the same length represents the same vector, i.e. vectors in general are not fixed in space. |
 |
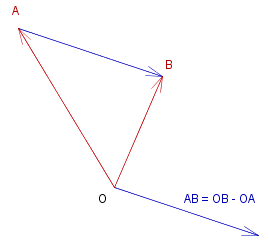 |
However if we assign some arbitrary point as the ~#{origin} , O say, then any line vector will be parallel to a vector beginning at O. Suppose AB || OC , then the end-point C represents the vector completely (given the origin O). So there is a one-to-one relationship between the points in 3D space, and 3D vectors. Such vectors are called #~{position vectors} (relative to origin O). In fact we will often use position vectors to represent points in space. We will assume some agreed origin O, and denominate the vectors #~a, #~b, etc. instead of OA, OB, ... |
Vector Representation of a Straight Line
| Consider a line through a point A, parallel to a vector OP. Then any point R on the line can be represented by a vector _ OR _ = _ OA + λ OP , _ where λ &in. &reals. | 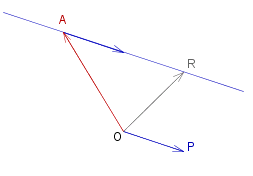 |
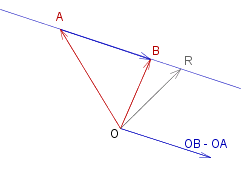 |
Now suppose the line passes through the points A and B, i.e. it is parallel to the vector AB. But _ AB _ = _ OB - OA , _ so we can represent the line by the equation: OR _ = _ OA + λ ( OB - OA ) _ = _ ( 1 - λ ) OA + λ OB , _ λ &in. &reals. |
|
or |
 |
Coordinates of Position Vectors
|
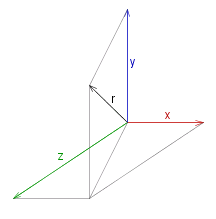
As we have seen, any vector can be expressed in terms of the rectangular basis ( #~i, #~j, #~k ). It is conventional to represent the coordinates of a position vector by ~x, ~y and ~z: #~r _ = _ ~x #~i + ~y #~j + ~z #~k Note that for this representation of position, we have arbitrarily chosen a point of origin O, and the direction of the basis. (#~i can be in any direction, #~j must be in the plane for which #~i is perpendicular, but then #~k is determined.) We must be careful that any representation of geometrical propertied of the space is not dependent on the actual choice of origin and rectangular basis, i.e. that the representation is valid even after translation or rotation. |
 |
Proofs of such invariances will not be provided in this set of notes, but it is worth bearing such considerations in mind in order to better understand what we are dealing with.
Three Dimensional Real Space
Three dimensional real space, &reals.&powthree., is the triple Cartesian product &reals. # &reals. # &reals., and consists of ordered triplets _ ( ~x , ~y , ~z ).
It's usual to call these triplets #~{points}, and as we have seen, we have a one-to-one relationship between points and position vectors. Furthermore, if we choose a basis (#~i, #~j, #~k) to lie along the ~x-, ~y-, and ~z-axes respectively, then the position vector associated with the 'point' _ ( ~x , ~y , ~z ) _ is just _ #~r = ~x #~i + ~y #~j + ~z #~k.
In certain circumstances we will want to differentiate between points in three dimensional space and three dimensional vectors. We will write &reals.&powthree. to represent the set of poins in three dimensional real space, and V_3 for the set of three dimensional vectors (over &reals.).
Curves
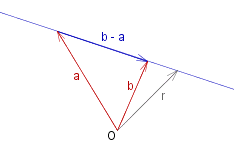
We saw above that a straight line through two points with position vectors #~a and #~b can be represented by the vector equation:
_ _ _ _ #~r ( λ ) _ = _ #~a + λ ( #~b - #~a ) , _ _ where λ &in. &reals.
This method can be used to describe many different spatial curves, i.e. the position vector of points on the curve are expressed as a (vector) function of a scalar (real-valued) variable, &theta. say. There are a number of things to consider:
- We usually let &theta. belong to some interval in &reals., e.g. _ &theta. &in. [ &theta._0 , &theta._1 ], _ &theta. &in. ( -&infty. , +&infty. ), _ &theta. &in. [ &theta._0 , +&infty. )
- each point in the curve is described only once, i.e. we cannot have #~r (&theta._2) = #~r (&theta._3) _ where _ &theta._2 != &theta._3
- A curve can have infinitely many different representations. For example the line from (0,0,0) to (0,0,1) could be described as _ #~r (λ) = λ ~#k , _ λ &in. [ 0 , 1 ], _ but also as #~r (&theta.) = 2 &theta. ~#k, _ &theta. &in. [ 0 , 0.5 ],
- The curves we will be dealing with will usually be continuous - i.e. have no 'breaks' (a formal definition of continuous is given later) - or have only a finite number of discontinuities (or breaks).
- Similarly, they will usually be 'smooth' - i.e. have a continuous first derivative ( derivatives of a vector function are defined later) - or be composed of a finite number of smooth segments.
In practice the function is usually expressed in terms of the co-ordinates relative to the orthogonal basis, e.g. the equation of the straight line above, would be
_ _ _ _ #~r ( λ ) _ = _ ( ~a_~x + λ ( ~b_~x - ~a_~x ) ) #~i + ( ~a_~y + λ ( ~b_~y - ~a_~y ) ) #~j + ( ~a_~z + λ ( ~b_~z - ~a_~z ) )#~k , _ _ λ &in. &reals.
#{Examples}
A circle in the ~x-~y plane ( ~z = 0 ) with centre at (0,0,0) and radius 1 has the equation:
_ _ _ #~r ( &theta. ) _ = _ cos &theta. #~i + sin &theta. #~j , _ _ 0 =< &theta. < 2 &pi.
Here of course &theta. represents the angle between the position vector of the point and the ~x-axis. Equivalently we could write:
_ _ _ #~r ( λ ) _ = _ cos ( 2 λ &pi. ) #~i + sin ( 2 λ &pi. ) #~j , _ _ 0 =< λ < 1
|
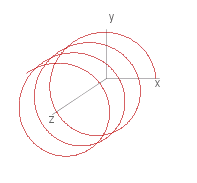
With a slight modification we can describe a helix along the ~z-axis: _ _ _ #~r ( λ ) _ = _ cos ( 2 λ &pi. ) #~i + sin ( 2 λ &pi. ) #~j + λ #~k, _ _ 0 =< λ =< 3.35 |
 |
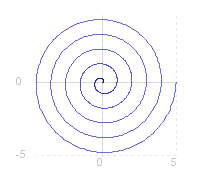 |
or by letting the radius increase, a spiral in the ~x-~y plane: _ _ _ #~r ( λ ) _ = _ λ cos ( 2 λ &pi. ) #~i + λ sin ( 2 λ &pi. ) #~j, _ _ 0 =< λ =< 5 |
Try your hand at drawing your own curves (in 2-D space at least), see the curve drawing tool.
Source for the graphs shown on this page can be viewed by going to the diagram capture page .